Introduction
Alors la soucoupe, elle tourne ou pas ?
Le lien entre l’objet suivi et les cibles sur l’écran ASA est une hypothèse émise par le pilote.
Comme nous n’avons pas de verrouillage radar sur l’objet suivi et que nous ne connaissons pas sa distance, il peut se trouver n’importe où le long de la ligne de visée – même en dehors de l’espace aérien restreint.
Cet article est la suite de celui-ci :
https://www.uap-blog.com/gimbal-alors-la-soucoupe-elle-tourne-ou-pas/
Traduction
Mick West, le 14 mars 2022 – Traduction par Toledo, le 16 mars 2022 – Tous droits réservés.
Dans cette vidéo, je vais démontrer quatre observables, quatre choses que vous pouvez vérifier vous-même, et qui démontrent que la vidéo de l’OVNI montre presque certainement un éblouissement qui cache un objet réel, et que la forme de l’éblouissement tourne uniquement parce que la caméra tourne.
Brièvement les quatre observables sont
1) Pas de rotation lors de l’inclinaison. La forme ne tourne pas lorsque le jet s’incline. Tout le reste tourne mais la forme ne tourne pas.
2) La bosse avant la rotation ; lorsque la forme tourne il y a un saut juste au début, parfois une fraction de seconde avant.
3) Motifs tournants ; lorsque la forme tourne il y a une rotation correspondante des motifs lumineux sur toute l’image.
4) Les dérotations correspondent exactement à la valeur de rotation nécessaire pour suivre la cible. (Sous-entendu qu’il s’agit bien d’un phénomène artificiel induit par la mécanique du système de suivis…)
Les trois premières sont des observations simples, elles ne nécessitent pas de maths pour voir leurs implications, mais juste une compréhension du système de fonctionnement de la caméra.
La dernière nécessite des maths, mais je peux aussi la démontrer avec une simulation pour que vous puissiez voir que les maths correspondent à la réalité physique.
Avant d’entrer dans les quatre observables, nous devons comprendre ce qui se passe lorsque nous regardons la vidéo, et comment elle est filmée.
La vidéo de l’OVNI Gimbal est la référence du poster des vidéos modernes d’OVNI que l’on trouve partout, c’est visuellement la plus intéressante des trois vidéos prises par les pilotes de la marine.

Elle semble montrer un objet en forme de soucoupe au-dessus des nuages, l’objet semblant ralentir et tourner sur lui-même, d’une manière qui semble défier l’aérodynamique, et c’est la seule vidéo de la Navy qui semble montrer des preuves de technologie avancée, elle est donc très importante pour les personnes qui défendent l’idée d’une origine extraterrestre.
Ici, je vais seulement défendre l’idée que ce que nous voyons est un reflet rotatif qui cache un objet réel, ce qui ne veut pas dire qu’il ne s’agit pas d’un objet vraiment intéressant, qui est toujours inconnu et non identifié.
Je ne vais pas parler de l’audio qui décrit une flotte d’objets, ou de ce qui se passe réellement dans le contexte plus large d’avions militaires dans un champ d’entraînement, juste le phénomène de ce reflet rotatif qui fait partie du puzzle.
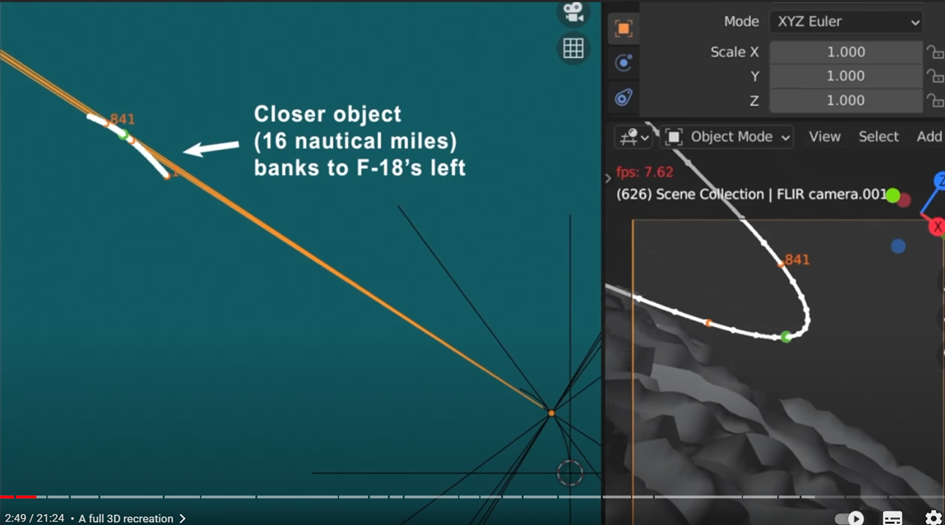
Je ne vais pas non plus aborder la question de la localisation et de la trajectoire de l’objet qui est, je crois, répondue par le travail d’Edward Currentqui s’est basé sur l’analyse de plusieurs personnes pour extraire les informations de vol du jet, et construire une variété de modèles 3D qui reproduisent la vidéo.
Il s’avère que plusieurs solutions sont possibles, mais la plus simple a été trouvée en modélisant un autre jet à environ 30 miles de distance, volant au loin et un peu à gauche.
Je vais inclure des liens vers ses vidéos et le fil de discussion dans la description.
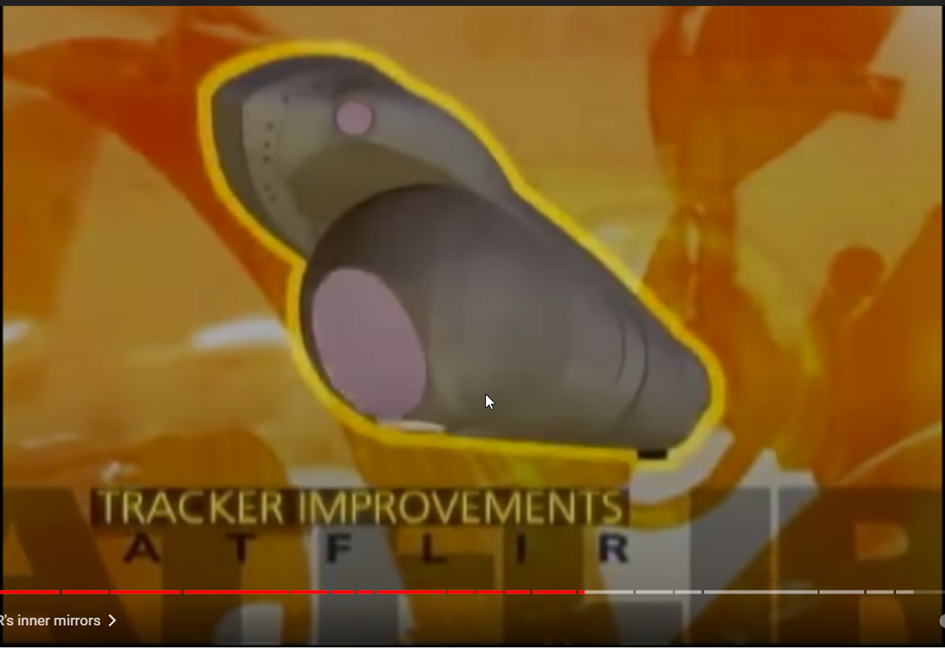
Avant de passer aux quatre observables des modèles de rotation, et à la correspondance de la rotation, nous devons comprendre le fonctionnement de la caméra qui dans ce cas est un système ATFLIR sur un FA-18 de la marine américaine.

Elle se présente sous la forme d’une nacelle de ciblage fabriquée par Raytheon.
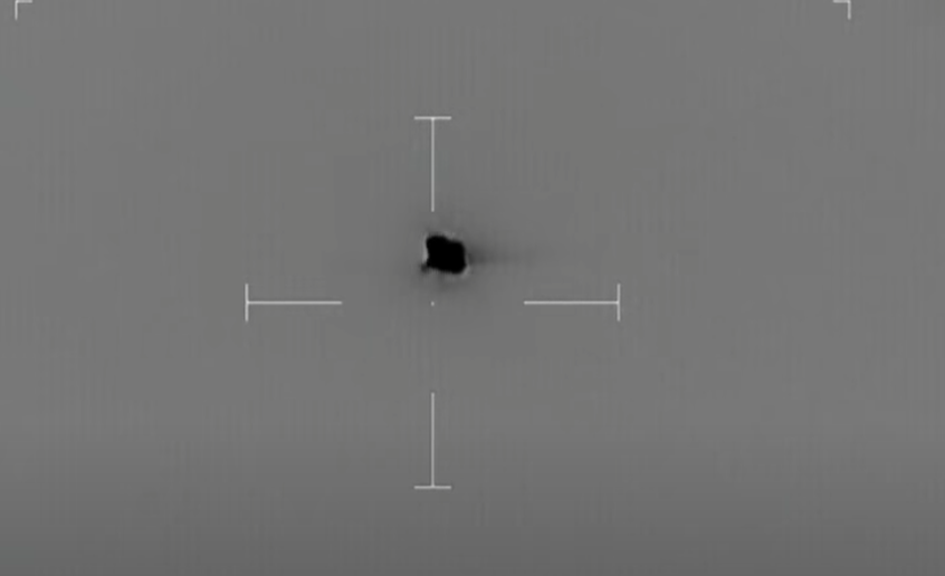
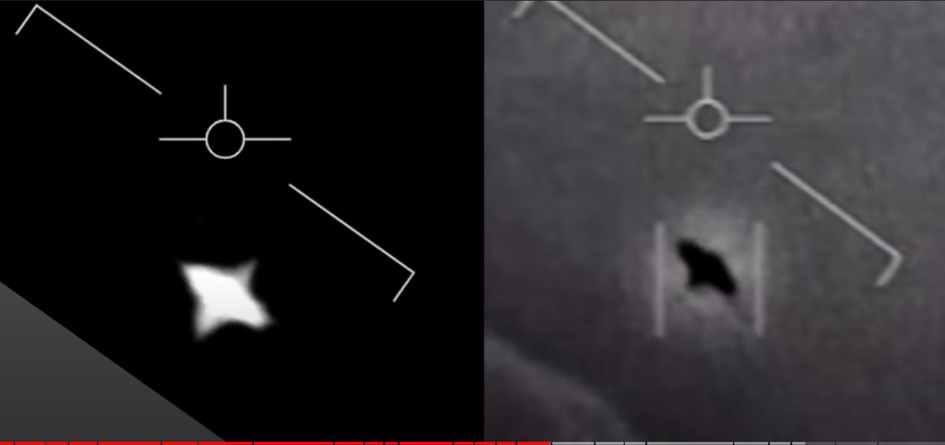
Nous observons une image infrarouge montrant la chaleur l’objet ; au milieu il est chaud et il y a une aura autour qui semble plus froide, mais c’est juste un artefact de l’imagerie thermique.
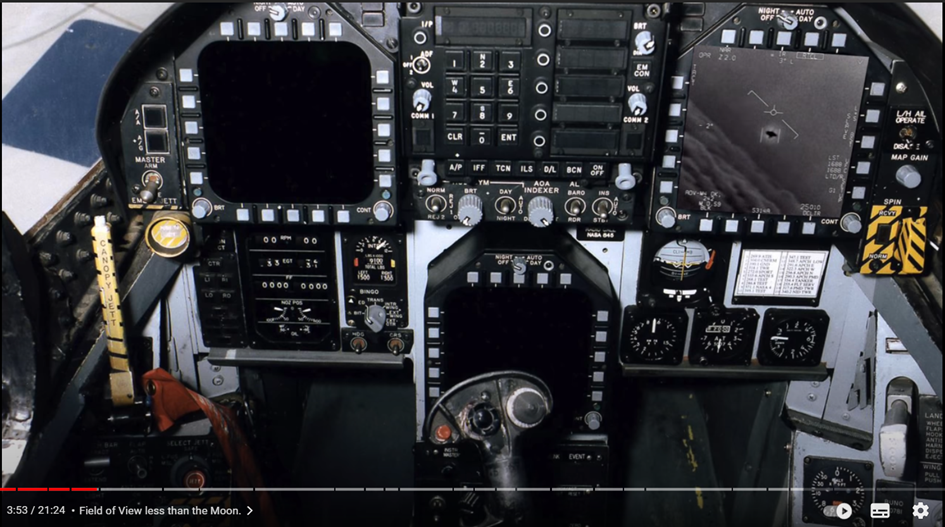
Ce qui nous intéresse c’est cette forme de soucoupe ; nous savons qu’ils ont fait un zoom incroyable, c’est en mode étroit avec un zoom additionnel de deux fois, donc la caméra ne montre qu’un tiers de degré du ciel.
Pour mettre cela en perspective, sortez et regardez la lune, qui fait un demi degré de diamètre.
Imaginez un carré d’environ deux tiers de cette taille, et c’est la surface que nous voyons dans l’image acquise par la caméra.
Donc nous savons que lorsque le pilote dit que l’objet tourne, il regarde juste l’écran, exactement la même chose que nous regardons.
L’objet serait trop petit pour être vue à l’œil nu, parce qu’il est à plusieurs kilomètres de distance.
La caméra est montée sur un système de cardan à deux axes, et cela pourrait être un indice, car le titre officiel de la marine pour la vidéo est justement gimbal, ce qui pourrait indiquer que le système gimbal a quelque chose à voir avec cela.
Le système gimbal signifie simplement qu’il y a deux axes de rotation, ou plus, où la rotation d’un axe change l’orientation de l’autre.
Avec la camera FLIR il y a le roulis, où la partie avant de la nacelle tourne le long d’un axe parallèle à la mire, et le tangage, où la boule à l’avant de la nacelle tourne autour d’un autre axe.
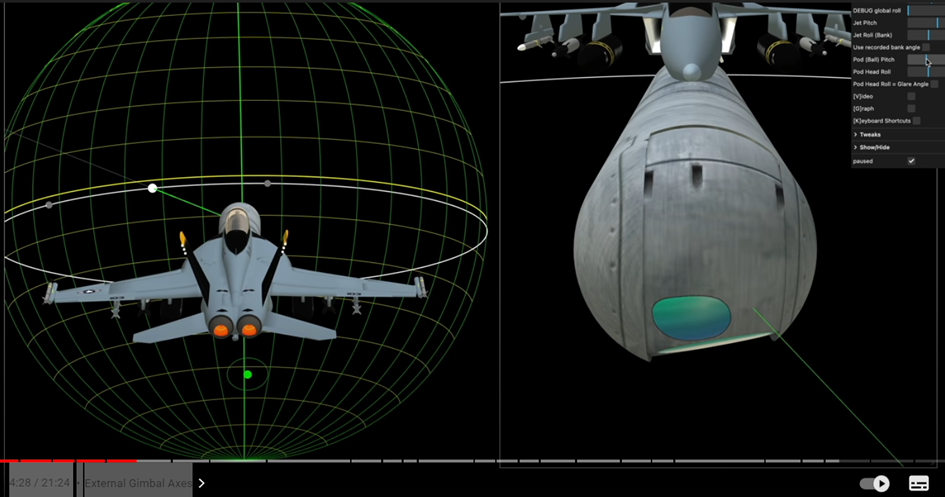
La nacelle tourne autour d’un autre axe, la rotation en roulis affecte l’axe de tangage, donc initialement le tangage se fait de haut en bas, mais si la nacelle roule de 90 degrés et que l’axe de tangage est maintenant vertical, et que le tangage se fait de gauche à droite.
Pour suivre une cible, la nacelle utilise une combinaison de tangage et de roulis pour que la ligne de visée pointe vers la cible.
Le roulis seul va juste déplacer la ligne de visée dans un cercle, ce qui n’est pas très utile pour le suivi.
Le tangage seul va déplacer la ligne de visée le long d’une ligne, et cette ligne peut parfois être utilisée pour le suivi de la cible.
Quelquefois cette ligne coïncide avec une cible, mais en général, il faut utiliser à la fois le roulis et le tangage.
Dans la vidéo du cardan nous suivons une cible qui commence à 54 degrés à gauche de l’avion, et finit à sept degrés à droite.
C’est en grande partie parce que l’avion est incliné et tourne à gauche, ce qui amène la cible devant lui.
Le mouvement par rapport aux nuages est la parallaxe, et il ralentit lorsque nous nous alignons sur une cible, mais il ne s’arrête pas, ce qui indique que la cible s’est déplacée vers la gauche.
Ce qui nous intéresse ici, c’est la rotation apparente
La discussion et la simulation se font en termes d’angles, qui sont tous affichés à l’écran ou dérivés de données à l’écran, et sont indépendants de la distance réelle de l’objet et de sa vitesse.
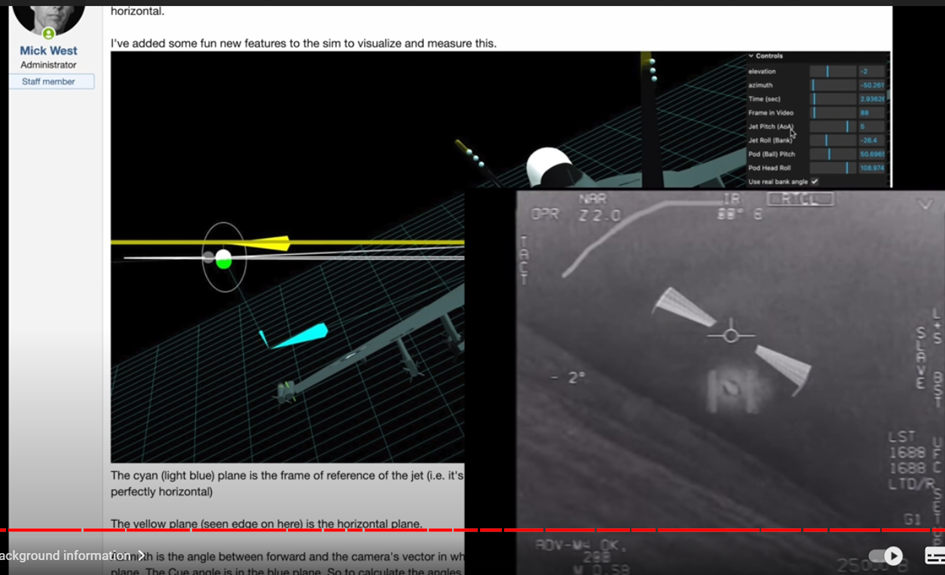
Lorsque l’objet est suivi de 54 à gauche à sept à droite, il reste à une valeur constante de moins deux degrés, c’est-à-dire deux degrés sous l’horizontale.
Dans la simulation, cela est représenté par le point blanc.
Le déplacement de la cible à travers la gamme d’angles montre comment la nacelle doit modifier son tangage et son roulis pour suivre la cible.
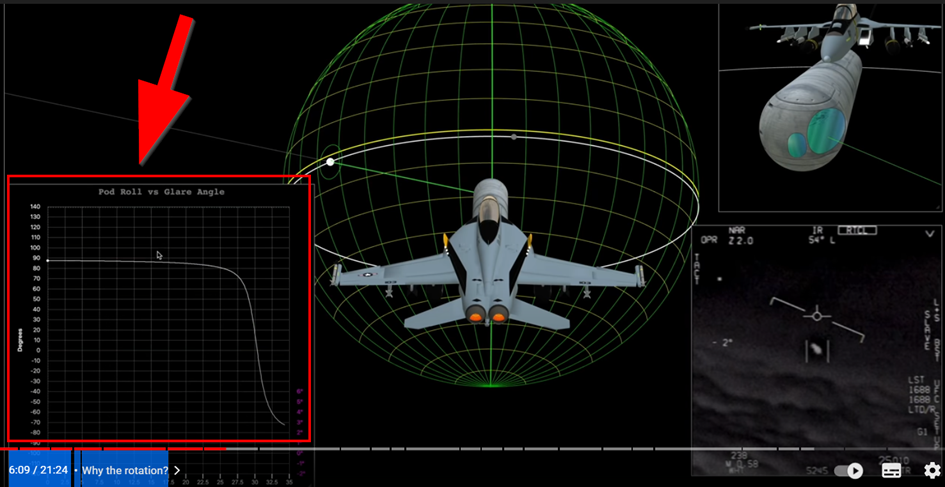
Le graphique ici montre l’angle de roulis de la nacelle dans une configuration simple avec le jet horizontal
Il démarre avec une partie enroulée à environ 90 degrés dans le sens horaire des aiguilles d’une montre
Initialement la plupart des mouvements de la nacelle sont des mouvements de tangage, mais au fur et à mesure que la cible se rapproche de la ligne droite, la nacelle est obligée de tourner davantage, et il y a un moment très rapide, lorsqu’elle croise la ligne droite, elle finit par rouler à environ 70 degrés dans le sens inverse des aiguilles d’une montre
Cela aide à comprendre pourquoi si nous tournons sur une vue qui montre les anneaux de roulis en rouge et les lignes de tangage en bleu.
Le tangage ne peut que suivre une ligne bleue ce qui est à peu près tout ce dont on a besoin au début, mais vers le centre, les lignes de tangage deviennent perpendiculaires à l’endroit où l’on veut aller, donc on doit compter sur le roulis à la place
Le jet est en fait de retour vers la gauche, ce qui change juste l’angle de roulis initial car il doit toujours rouler de la même manière, donc la courbe est la même, il suffit de la décaler vers le haut
Maintenant si nous regardons la vidéo l’angle d’inclinaison de l’avion montré par rapport à l’horizon artificiel n’est pas constant, il change d’angle d’inclinaison vers la gauche quatre fois, et vers la droite une fois.

Nous pouvons extraire ces données de la vidéo avec le suivi de mouvement, et les ajouter à la simulation.
L’inclinaison vers la gauche dans le sens inverse des aiguilles d’une montre signifie en fait que la nacelle a besoin d’être déplacée vers la droite.
Cela rend la courbe un peu plus irrégulière, mais la maintient dans une plage plus étroite au début.
De même que l’inclinaison, le jet doit se cabrer un peu en vol pour maintenir l’angle d’attaque, nous utilisons un tangage de base de 3. 6 degrés, ce qui est en accord avec les valeurs données dans le manuel des opérations du f 18 pour 25 000 pieds.
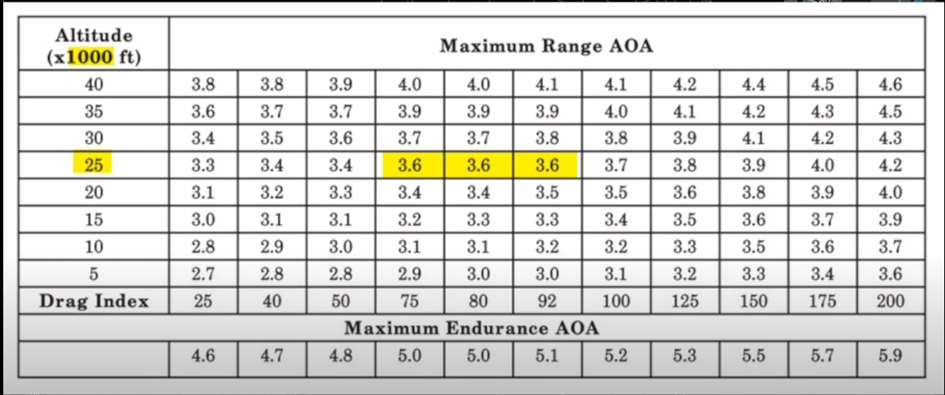
Cette valeur est aussi augmentée par l’angle d’inclinaison pour tenir compte de la perte de portance.
Ce qui est intéressant dans le fait de cabrer l’avion, c’est que cela aplatit la courbe du roulis nécessaire pour suivre la cible
La combinaison de l’inclinaison et du cabrage réduit le roulis total nécessaire d’environ 30 degrés, donc maintenant nous avons un bon modèle de la façon dont la nacelle doit être maintenue en vol.
Nous avons maintenant un bon modèle de la façon dont la nacelle doit tourner et s’incliner pour suivre une cible de 54 degrés à gauche à sept degrés à droite, tout en tenant compte du mouvement du jet.
Qu’en est-il de cet éblouissement ?
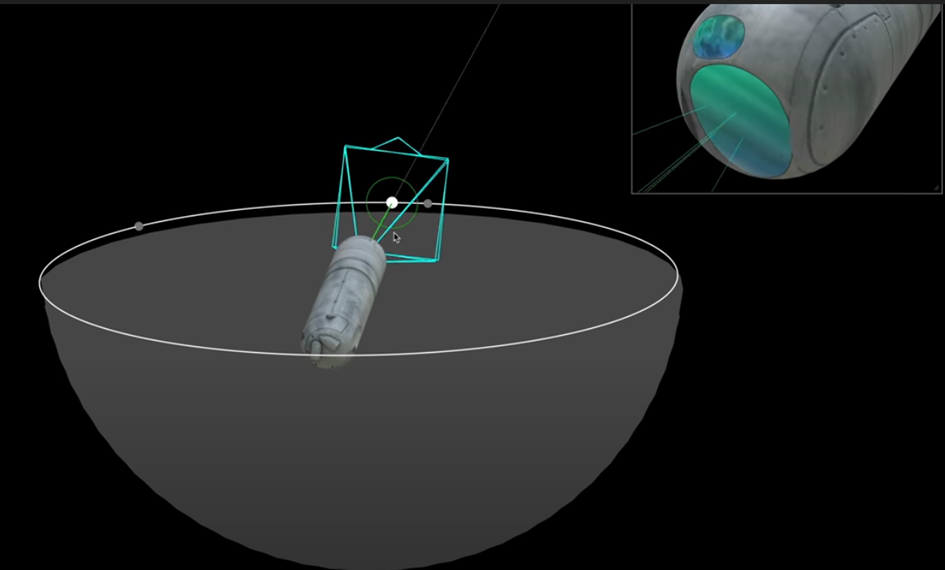
Un problème lorsque l’on fait tourner la caméra ou, dans le cas de l’ATFLIR, ce que l’on appelle l’optique a quatre focales, qui agrandit aussi l’image.
Par exemple si vous regardez à gauche et que la caméra tourne dans le sens des aiguilles d’une montre à près de 90 degrés, voyez le petit triangle ici dans la pyramide qui indique le sommet.
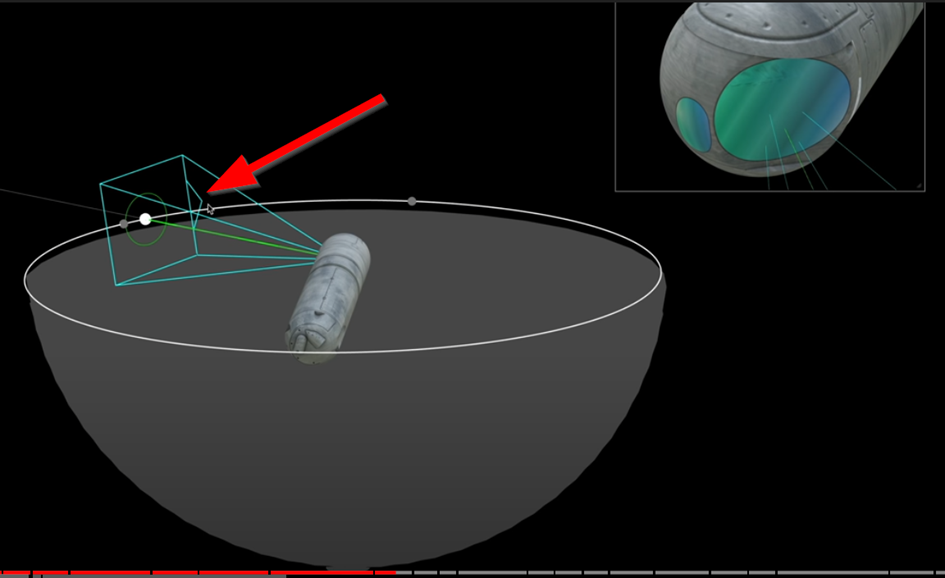
La rotation de la caméra dans le sens des aiguilles d’une montre signifie que l’image est tournée dans le sens inverse des aiguilles d’une montre.
Voici la vue latérale de la nacelle ; comparez-la à ce qui est dans la boîte à la fin du tronc d’observation, nous ne voulons pas cette rotation, nous voulons que l’horizon dans l’affichage ressemble à l’horizon par la fenêtre, donc l’ATFLIR comprend un dispositif interne appelé un « D-Row« , abréviation de « dérotation« , qui prend l’image entière et la renvoie à l’angle correct.
Nous le voyons explicitement dans les vidéos des autres Pods de ciblage.

Lorsque vous faites tourner une image de la même taille que l’écran, vous obtenez des régions noires, et vous pouvez voir le rectangle qui tourne, c’est l’image originale.
Remarquez ici vous ne voyez pas les régions noires lorsque vous zoomez.

Une autre chose que l’on voit dans cette vidéo est l’éblouissement.
L’éblouissement est la lumière, ou dans ce cas la radiation thermique, qui se répand autour d’un objet brillant ou chaud.
C’est souvent une forme circulaire ou ovale, mais il peut aussi y avoir des pics dans différentes directions.
Ces pics peuvent être longs ou courts, et la forme de l’éblouissement peut ne pas être liée à la forme de l’avion.
Alors que la vraie forme est celle-ci…

Dans cette vidéo il y a une voiture en feu, très chaude, et un grand pic de diffraction bien visible.

On voit le pic de diffraction tourner nettement ici, et à un moment on voit le message « gimbal Roll » apparaître à l’écran …

… Avant une correction majeure et une rotation de l’éblouissement.
Plus tôt dans la vidéo on voit la rotation d’un éblouissement plus petit. Ce n’est pas aussi prononcé, mais il tourne, puis on fait un zoom arrière nous permettant de voir l’image originale avant la rotation ; remarquez que l’éblouissement tourne exactement à la même vitesse que l’image originale, et c’est parce que l’éblouissement tourne à la même vitesse que l’image originale.

Car l’orientation de l’éblouissement est relative à la caméra
Faites tourner la caméra et l’arrière-plan tournera, mais l’angle de l’éblouissement restera inchangé

Vous pouvez le voir avec l’éblouissement dans un iPhone…
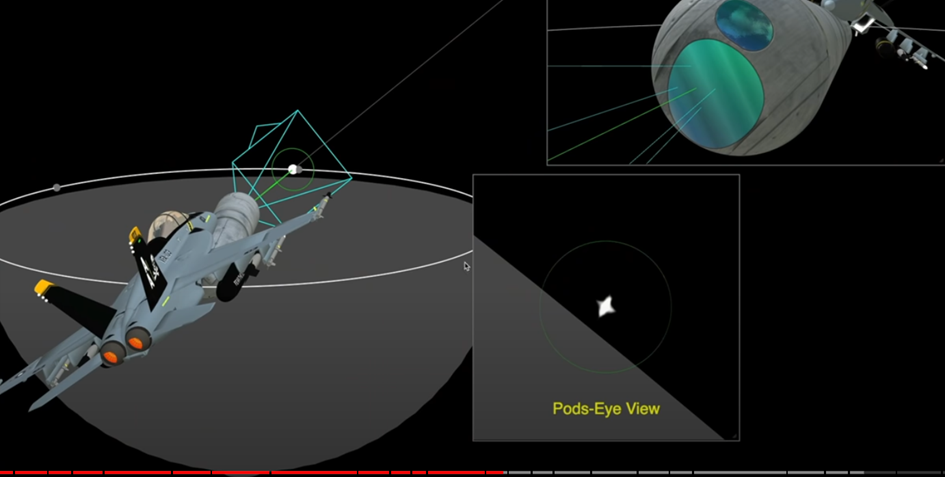
..Et regardez la vue de l’œil du Pod, ici avec un éblouissement ajouté, l’orientation de l’éblouissement ne change pas.
Donc ce qui finit par apparaître à l’écran, est la vue de l’œil du Pod ayant subi une dérotation, puisque le dispositif de dérotation fait tourner l’image entière, et que l’arrière-plan a tourné.
Mais le reflet est fixé à la caméra, alors le résultat final est que l’arrière-plan ne tourne pas, mais que le reflet tourne.
Il est important de se rappeler que le dispositif de dérotation n’est pas responsable, du fait que le reflet tourne indépendamment de l’arrière-plan.
Le dispositif de dérotation affecte l’image entière, de la même manière la séparation du reflet et de la rotation de l’arrière-plan a déjà eu lieu, tout ce que le dispositif de dérotation ne fait que faire tourner l’image entière pour placer l’horizon au bon endroit.
Nous avons maintenant une simulation du comportement d’un éblouissement avec ces angles.
Nous pouvons voir qu’il est déjà assez similaire à la vidéo « Gimbal », il tourne de la même façon et à peu près aux mêmes moments.
Il y a quelques différences dans la simulation avec les premiers roulements du jet.
Nous voyons de petites rotations de l’éblouissement lorsque le rouleau de la nacelle s’ajuste à l’angle parfait, mais dans la vidéo originale, il n’y a pas de rotation de l’éblouissement, car le Pod s’ajuste à l’angle parfait.
Mais dans la vidéo réelle la cible reste fixe pendant les 20 premières secondes, et ensuite quand la cible fait cette grande rotation, elle se produit par étapes dans la vidéo réelle, mais dans la simulation c’est un mouvement plus lisse.
Pour comprendre cela nous devons comprendre le fonctionnement interne de l’appareil.
Il y a les deux grands cardans externes pour le tangage et le roulis…

… Mais il y a aussi un ou deux cardans internes additionnels qui peuvent diriger le Pod sur la cible et l’orienter.
Ils sont munis avec des miroirs, et ceux-ci peuvent être utilisés pour diriger la ligne de visée sans utiliser le roulis, pour éviter le verrouillage du cardan près de la zone que l’on appelle la singularité du cardan, mais ils pourraient aussi être utilisés pour une variété d’autres situations.
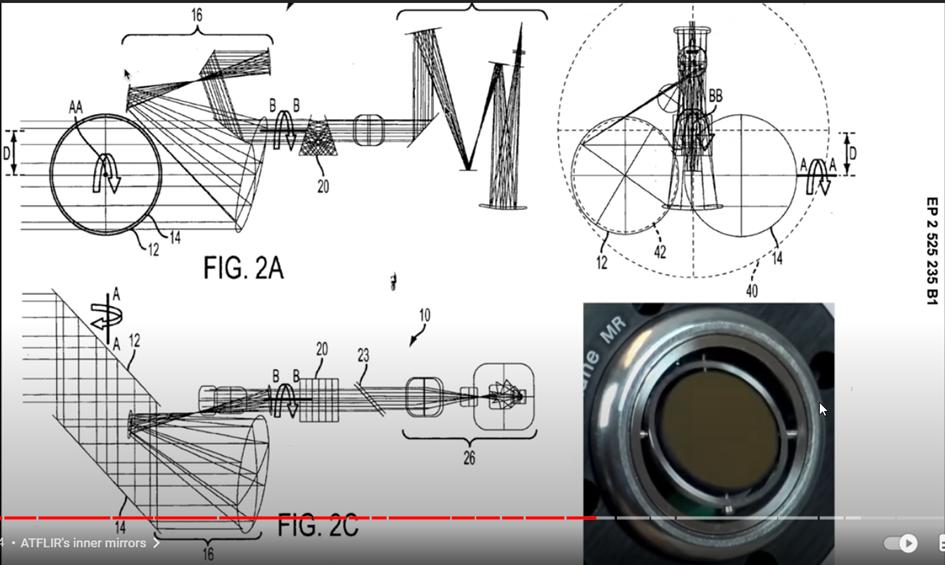
Ils sont décrits dans divers schémas de Raytheon, nous ne connaissons pas la configuration exacte, ou comment ils étaient programmés pour fonctionner au moment de cette vidéo, mais nous savons qu’ils sont couramment utilisés, et qu’ils donnent à la caméra environ cinq degrés de flexion, où vous pouvez garder la cible avec les cardans internes, même si les cardans externes ne travaillent pas.
Je soupçonne que ce qui se passe, c’est qu’on essaie de minimiser l’utilisation de l’axe de rôle principal pour éviter la perte du verrouillage de la cible, et pour positionner le système de manière optimale pour les mouvements futurs probables.
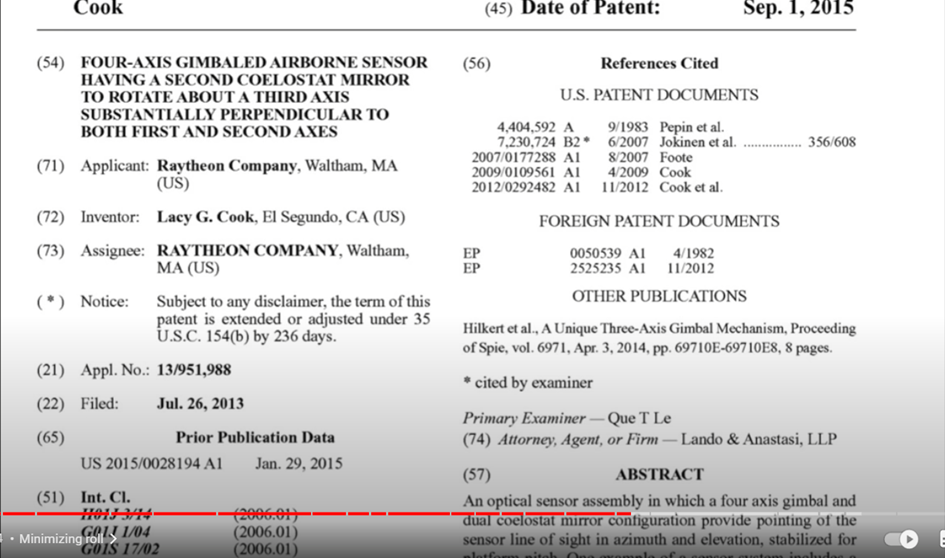
Les brevets en parlent un peu en disant que l’axe de rôle principal peut nécessiter une puissance importante, qu’il n’est pas rapide ou agile, et qu’il n’est pas particulièrement précis.
Donc il est logique de n’utiliser l’axe de rôle principal que pendant de courtes périodes, s’il y a un autre système qui peut prendre le relais de manière plus précise.
Nous pouvons ensuite l’utiliser dans la simulation pour contrôler directement l’angle de roulis de la nacelle, c’est la ligne verte dans le graphique et le point vert dans la simulation.
Maintenant, nous pouvons enfin obtenir nos quatre observables.
Tout d’abord, pas de rotation pendant la première acquisition.
L’explication la plus simple de l’absence de rotation pendant les 20 premières secondes est que la nacelle évite de rouler
Si nous regardons la distance angulaire entre le point blanc, la cible, et le point vert, la ligne de visée, déterminée par l’angle d’éblouissement, ils restent très proches.
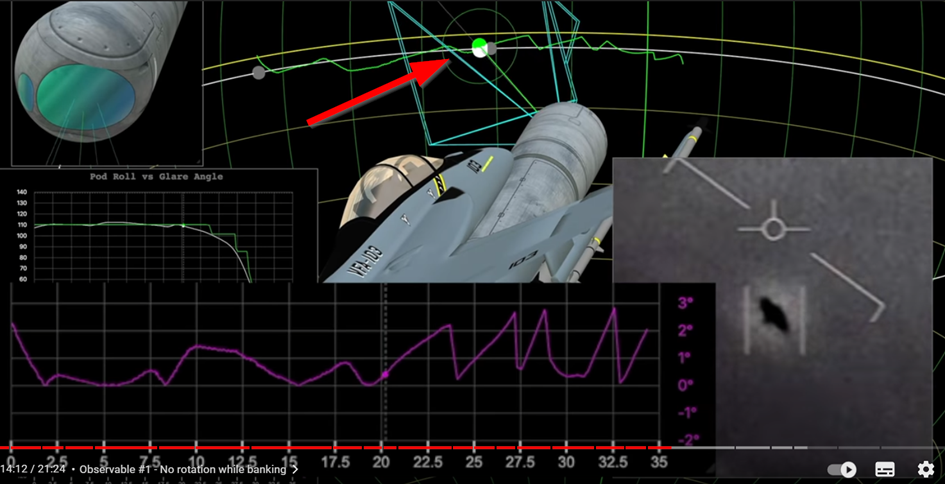
Soit 0.2 degrés sur les 20 premières secondes avec 5 degrés de flexion des cardans internes, il n’y a pas besoin des légères corrections dont nous aurions besoin avec les deux cardans externes.
Cependant, s’il s’agissait d’un objet réel à 15 km de distance et que sa forme était réelle, alors lorsque l’avion s’incline, la scène entière devrait tourner.
Donc si c’était une vraie soucoupe alors elle devrait aussi tourner avec l’horizon ; au lieu de cela elle est fixe pendant les 20 premières secondes alors qu’elle est à un angle fixe de l’horizon.

L’horizon artificiel et l’horizon réel sont indiqués par les nuages et la bande sombre au-dessus d’eux tourne de 12 degrés en trois étapes au cours de ces 20 premières secondes, et c’est probablement le plus significatif des quatre observables
Vous pouvez le voir simplement en regardant les 20 premières secondes de la vidéo en faisant des allers-retours, et voir l’horizon tourner, mais pas l’objet, soit quelque chose à plus de 15 km de distance, qui reflète précisément les petits changements dans l’angle d’inclinaison aléatoire d’un jet, ou alors c’est un artefact de la caméra.
La deuxième observable est les sauts avant la rotation
Chaque fois que la cible tourne nous voyons juste avant, un petit saut dans toute la scène.
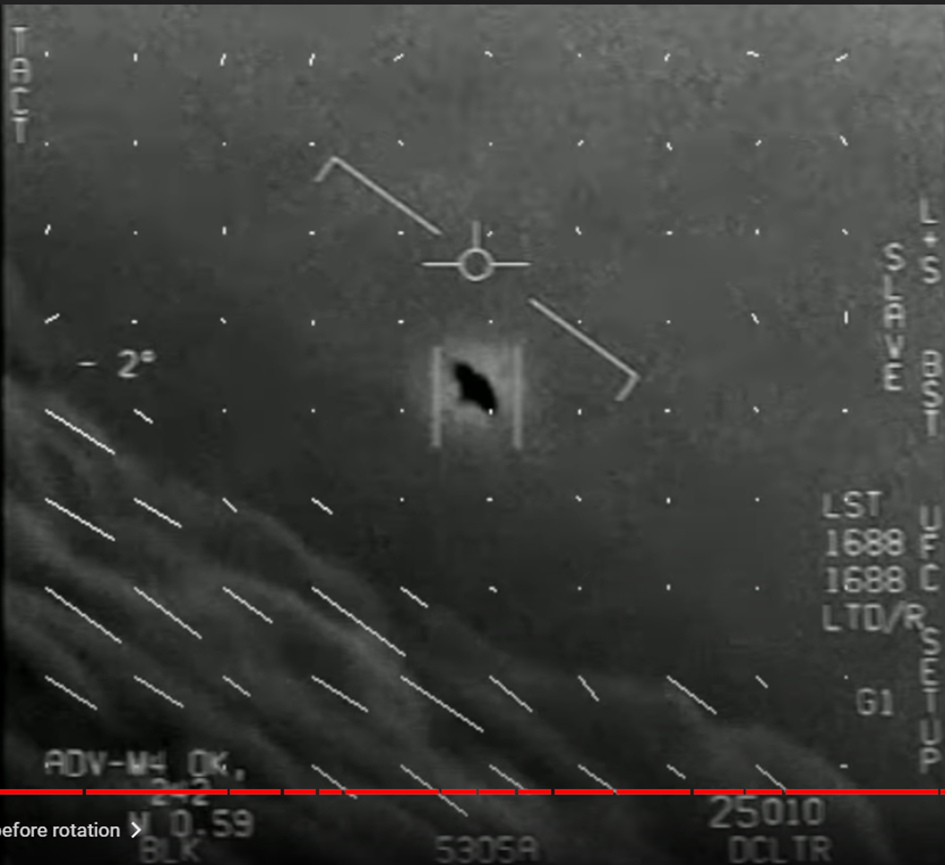
On peut les voir dans la vidéo originale, mais c’est plus clair si on utilise OPENCV pour calculer un champ de vitesse pour la vidéo.
On voit le mouvement des nuages se décaler un peu avec le saut avant que la rotation ne commence.
Cela signifie qu’il y a un mouvement de caméra juste avant la rotation apparente de l’objet.
Ou c’est l’objet qui bombarde l’avion d’énergie à 15 km de distance, juste avant qu’il ne décide de tourner, soit c’est un artefact de la caméra
Le troisième observable
Il s’agit de la rotation de motifs quand l’objet, enfin l’éblouissement, tourne, nous voyons aussi des motifs lumineux en arrière-plan de l’image tourner, ce qui est plus facile à voir si vous couvrez l’éblouissement.

Ils se déplacent en synchronisation avec la rotation de l’éblouissement, même lorsque l’avion ne tourne pas, ce qui ne peut être expliqué que comme un artefact de la caméra.
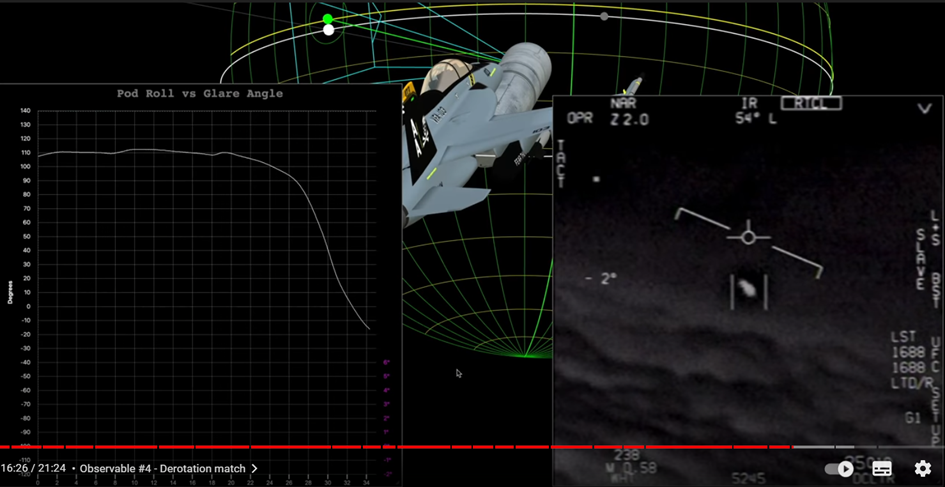
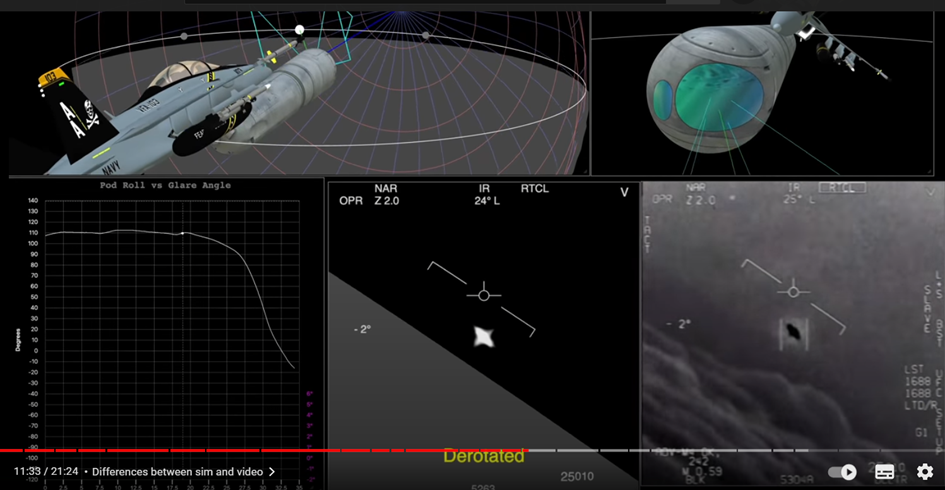
Enfin, il y a l’incroyable synchronisation entre le roulis calculé, la ligne blanche, et le roulis qui est simplement le même que l’angle de l’éblouissement, la ligne verte.
Pendant les 20 premières secondes, ils sont à environ 2 degrés près, pas besoin d’ajuster, mais à environ 23 secondes, nous nous éloignons de plus de 2,5 degrés, et il y a une différence d’angle de 2 degrés et il y a un petit roulis à corriger.
Cela se produit à 26 secondes, et ensuite à 28. 5 secondes cela se reproduit mais cette fois avant que la correction ne se termine, il y a un roulis du jet dans le sens des aiguilles d’une montre, ce qui signifie que la nacelle doit tourner plus dans le sens inverse des aiguilles d’une montre, donc nous avons cette longue correction jusqu’à ce que le jet s’arrête de tourner, puis il y a une autre correction comme les autres, et finalement nous terminons juste avant qu’une autre correction ne soit nécessaire.
Donc si ce n’est pas un éblouissement provoqué par un objet à plus de 15 km, probablement à 30, qui tourne en quelque sorte quand le jet tourne, il reste fixe dans le cadre de la caméra.
Ce serait un objet qui projette d’une manière ou d’une autre des motifs lumineux rotatifs, qui tournent avec lui, un objet qui tourne d’une manière qui correspond exactement à ce qui est nécessaire pour rester à moins de trois degrés d’un système gimbal qui suit la cible tout en minimisant le roulis.
Ou alors c’est un éblouissement qui tourne à cause du système gimbal, dans une vidéo dont le titre donné par la NAVY est justement Gimbal.
Ce n’est pas un trucage des chiffres ou une gymnastique mentale, c’est une simulation open source que vous pouvez essayer vous-même, elle se trouve sur metabunk.org/gimbal
Les données ont toutes été extraites des vidéos de la marine, et vous pouvez vérifier qu’il y a de longs fils de discussion sur Metabunk à propos de tout cela, où je discute de ce que je montre ici, et vous pouvez voir le processus de découverte et de compréhension de ces choses, ce n’est pas seulement un travail de moi, beaucoup de gens ont fait un travail similaire.
L’absence de manque de rotation a été soulevé par un utilisateur de Twitter appelé Reality seeker, et a probablement été remarqué par d’autres avant cela.
Le rôle du tangage de l’avion a été soulevé par l’utilisateur metabunk Marcus qui a également extrait l’angle d’éblouissement, et a démontré la correspondance étroite avec le brut attendu. D’autres personnes ont fait de même.
Il y a également eu des discussions supplémentaires, que je n’ai pas le temps d’aborder, comme la façon dont la relation entre le point q de la direction et l’azimut vérifie l’angle de tangage de 3,6 degrés.
Beaucoup de gens ont participé et aidé, et beaucoup de gens sont d’accord avec ces données.
Je sais que cela ne convaincra pas tout le monde, mais j’espère que cela aidera les gens à comprendre l’hypothèse de l’éblouissement rotatif, et pourquoi ce modèle d’interprétation correspond si bien aux données vérifiables.
Si vous avez fait tout le chemin jusqu’à cette vidéo et que vous avez encore des questions alors je serais heureux d’en discuter.
Je serais également heureux de démontrer tout cela avec le simulateur lors d’une réunion zoom, et même en direct sur YouTube si vous le souhaitez.
Enfin je sais qu’il y a une question, à savoir si les brevets de Raytheon décrivent l’utilisation des cardans internes dans cette affaire pour donner la souplesse nécessaire au système. Ils ne le font pas exactement, mais ils ne l’excluent pas.
Le matériel n’est pas un problème, c’est juste une question d’algorithme, et nous ne savons pas quel algorithme était utilisé ce jour-là, ces choses sont hautement classifiées.
J’ai demandé au détenteur du brevet à ce sujet, et il a dit qu’il n’était autorisé à commenter que ce qui était dans les brevets publics.
Mais au final nous savons que cette forme dans la vidéo ressemble et agit exactement comme un éblouissement, donc c’est probablement ce dont il s’agit.
L’apport de EdwardCurrent
EdwardCurrent a également fait une analyse très fouillé, et en recréant un modèle 3D selon les angles affichés, ainsi que les nuages. Et il a récré une trajectoire, qui lui fait dire qu’il s’agit probablement d’un jet privé.